
Wheelphone blob docking
50+
Downloads

Everyone
info
About this app
The Wheelphone robot has the opportunity to charge itself automatically with the help of the docking station.
This application is an example of using blob detection and ground sensors to let the robot reach the docking station and charge itself.
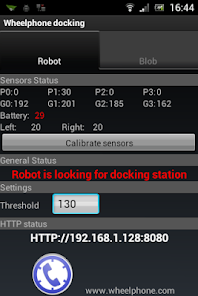
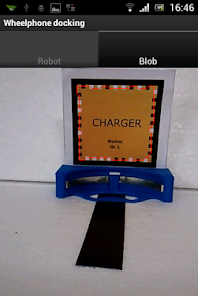
There are two tabs: one illustrates some sensors value, the current state of the robot and some others information, the second one let the user choose which color to follow, that must reflect the docking station target color.
The application is designed for the following sequence:
1) choose the color of the blob to follow
2) the robot move around looking for the docking station
3) once a blob is detected the robot starts going towards it
4) when the black line (going to the charging contacts) is detected, follow
it until the contact is fully accomplished
Blob detection is performed using the OpenCV library.
More information about this application, how to use it and the source code are available in the Wheelphone wiki http://www.gctronic.com/doc/index.php/Android_software#Wheelphone_blob_docking.
[Autonomous docking group]
This application is an example of using blob detection and ground sensors to let the robot reach the docking station and charge itself.
There are two tabs: one illustrates some sensors value, the current state of the robot and some others information, the second one let the user choose which color to follow, that must reflect the docking station target color.
The application is designed for the following sequence:
1) choose the color of the blob to follow
2) the robot move around looking for the docking station
3) once a blob is detected the robot starts going towards it
4) when the black line (going to the charging contacts) is detected, follow
it until the contact is fully accomplished
Blob detection is performed using the OpenCV library.
More information about this application, how to use it and the source code are available in the Wheelphone wiki http://www.gctronic.com/doc/index.php/Android_software#Wheelphone_blob_docking.
[Autonomous docking group]
Updated on
Safety starts with understanding how developers collect and share your data. Data privacy and security practices may vary based on your use, region, and age. The developer provided this information and may update it over time.

No data shared with third parties
Learn more about how developers declare sharing

No data collected
Learn more about how developers declare collection





